高等教育領域數字化綜合服務平臺






北京理工大學
工業和信息化部
- 42 高校采購信息
- 934 科技成果項目
- 1 創新創業項目
- 0 高校項目需求
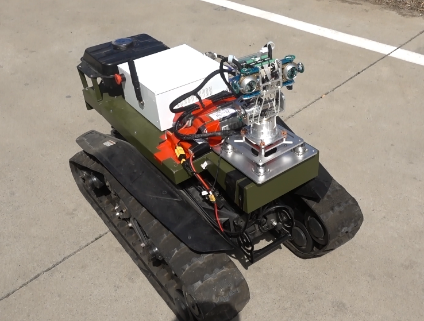
一種防抖、寬視野的仿生眼


所屬領域:
項目成果/簡介:
本項目面向室內外環境下對目標和環境的可靠快速感知需求,突破高性能主動適應的混合穩像、動態目標快速搜索追蹤、智能探索感知的快速地圖創建和定位與場景理解關鍵技術,研制具有高穩定性、寬視野功能的仿生眼樣機一套,可實現快速追蹤動態目標,實現環境三維建模與場景理解,成果將為機器人智能化、自主化導航提供主動感知的新途徑。重點開展如下研究:
1)具有高穩定性、寬視野功能的仿生眼研制
研究仿生眼的結構高動態輕量化優化設計及優化的電機驅動方式,提出眼球各自獨立運動、眼頸協調的關節配置方案,研究多軸關節的實時同步控制,研究圖像傳感器、IMU傳感器及RGBD傳感器的硬件高精度同步方法及GPU加速方法,實現對環境的高精度時間同步視覺感知。
2)高性能主動適應的混合穩像算法
針對圖像抖動模糊問題,研究主動適應的機電混合穩像算法;結合姿態反饋信息通過眼頸關節協調進行適應性姿態調整去除低頻擾動,通過IMU及圖像時間序列進行相機6D位姿估計與濾波消除高頻擾動,實現主動適應混合穩像算法。
3)動態目標快速搜索追蹤算法
針對快速運動的視覺目標,研究基于深度強化學習和注意力機制的目標跟蹤算法;同時研究基于眼頸運動神經回路控制機理的眼頸協調優化視覺伺服跟蹤算法,使冗余眼頸關節實現優化協調運動,實現時間最優快速目標追蹤。
4)智能快速地圖創建和定位與場景理解
針對未知場景,基于雙眼RGB圖像序列及深度傳感器信息,生成仿生眼環境觀測的序列決策指令,實現更優更快的環境地圖創建。實現室外環境三維建模與場景理解。

應用范圍:
智能駕駛
項目階段:
技術樣品在實際環境測試完成

掃碼關注,查看更多科技成果
取消
確定