






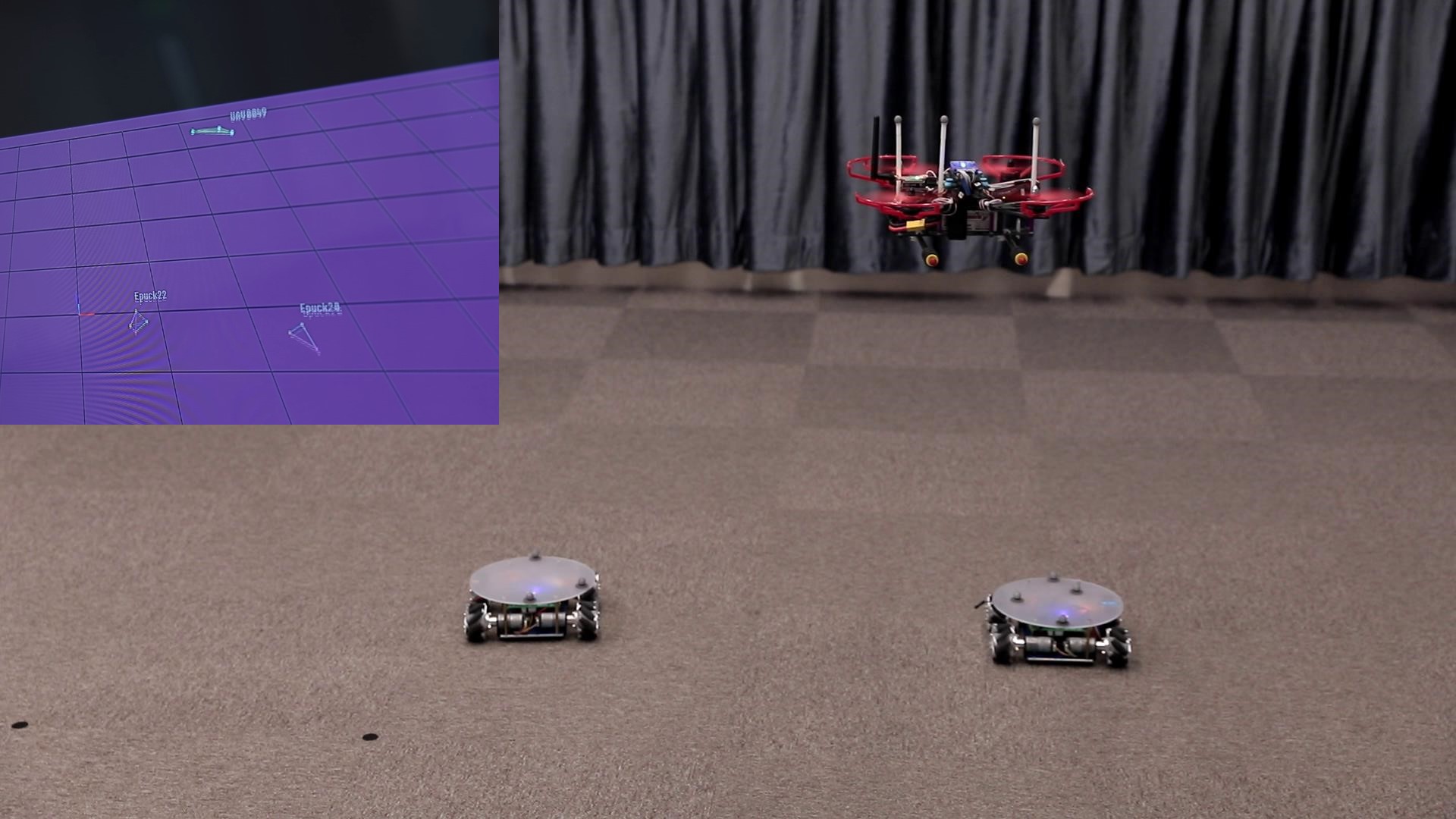







北京理工大學多智能體協同控制實驗平臺功能 • 無人機姿態控制 根據用戶需求,自定義需要捕捉的部位,利用NOKOV精確捕捉運動物體的位置及姿態等三維數據。 • 無人機/無人車動態角色分配 根據NOKOV實時反饋的位置信息,使出現在隨機位置的多智能體,以最短路徑形成理想編隊隊形,為其他多智能體協同控制實驗提供了基礎。 • 空地協同編隊、自主避障與跟隨 由于設備的可拓展性,用戶可隨意增減目標數量,通過在軟件內對目標進行命名等操作,來完成對大批量運動體的同時捕捉。 NOKOV(度量)光學三維動作捕捉系統功能 • 六自由度動作捕捉數據 采集三維空間XYZ坐標、六自由度(6Dof)、偏航角(Yaw)、橫搖角(Roll)、俯仰角(Pitch)、歐拉角等數據,為無人機的位姿控制、運動規劃提供連貫、流暢的動作數據基礎。 • 亞毫米的定位精度 與采用GPS、航跡推算、全局攝像頭、UWB等定位方法的實驗平臺相比,該平臺的精度大大提高,可達亞毫米級。 • 豐富的二次開發接口 采集到的數據可以以VRPN形式傳輸,或通過SDK(C++語言)端口廣播與ROS、Labview、Matlab(包含Simulink)等軟件通信進行二次開發。 • 軟件具有一鍵建立剛體功能,大幅提高工作效率
高等教育領域數字化綜合服務平臺

確定
取消
確定
交換名片
取消
確定